: 5 žingsniai")
Turinys:
- Autorius John Day day@howwhatproduce.com.
- Public 2024-01-30 10:48.
- Paskutinį kartą keistas 2025-01-23 14:59.


Sveiki atvykę į naują projektą !!!
Pirmiausia norėjau padaryti šiurpias akis, kaip tai daro kostiumai ir Helovinas. Man patinka specialieji efektai ir norėjau išmokti kurti savo animatronines akis, naudojant arduino, servo ir stalo teniso kamuoliukus.
1 žingsnis:
Surinkite reikmenis…
2 servo varikliai (aš nuėjau su pigiausiu įmanomu „Hobby Town“parduotuvėje)
arduino uno (adafruit)
traukimo strypai („Hobby Town“)
2 pusės velenai („Hobby Town“)
2 stalo teniso kamuoliukai
jungtys („Hobby Town“)
Putų polistirolo galvutė (Michaels)
kitos įvairios prekės …
1 žingsnis: 2 žingsnis: dažykite akis


2 žingsnyje norėjau eiti į priekį ir piešti akių obuolius, kuriuos padariau pats. Taip, jie šiek tiek nutolę, bet iš tolo atrodo puikiai! Jei turite klausimų, kokius dažus naudoju, tiesiog komentuokite žemiau ir paklauskite:)
Akių darymas:
Reikalingos medžiagos:
4 maži ploni teptukai
dažyti
Popierinis rankšluostis
Norėdami padaryti akis, pradėkite nuo dviejų stalo teniso kamuoliukų ir sąžiningai tiesiog perpjaukite juos per pusę peiliu ar dėžute. Tada pirmiausia nudažykite juos baltu pagrindu, kad paslėptumėte visus trūkumus. Po to pradėkite sluoksniuoti, kokios spalvos akis bandote pasiekti. Savo naudoju žalią ir mėlyną. Mano spalvų paletė buvo žalia, mėlyna, balta ir juoda.
2 žingsnis: 3 žingsnis: pagrindo sujungimas


3 žingsnis: pagrindo surinkimas
Reikalingos medžiagos:
akrilo lakštai
atsitiktinis metalo gabalas
varžtai
pusės velenai
juostinis pjūklas (nebūtinas)
Pirmiausia iš akrilo lakšto iškirpiau norimą formą ir dydį. Tada aš išpjoviau metalinius laikiklius tik iš metalo laužo. Kai aš juos pasiekiau ten, kur norėjau, aš išgręžiau varžtų skyles ir prijungiau laikiklius prie pagrindo, kaip parodyta paveikslėlyje. Vienam iš savo servo aš turėjau iškirpti mažą stačiakampio formą, kad įsitikinčiau, ar ji ten tinka. Taip buvo siekiama įsitikinti, kad jungtys ir viskas buvo tinkamai suderintos.
3 žingsnis: 4 žingsnis: servo ir jungčių įdėjimas



4 žingsnis: Servo ir jungčių įdėjimas
Reikalingos medžiagos:
2 servos
jungtys
maži akrilo kvadratai
varžtai
jungtys
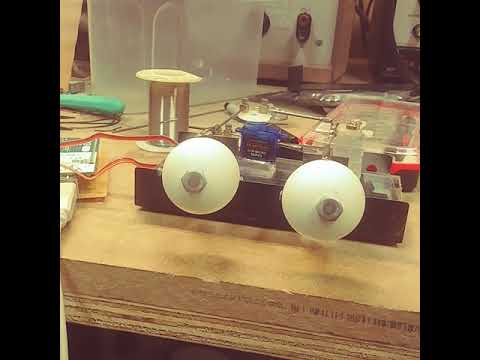
Ketvirtam žingsniui padėjau vietą, kur viskas vyks, ir išdėliojau. Norėdami įsitikinti, kad viskas yra tolygiai ir išmokyta, po vienu servo turėjau įdėti mažus iškirptus akrilo gabalėlius. Aš turėjau įdėti tą patį gabalų kiekį po jungtimi, jungiančia akį su servo. Po to, kai visos vietos ir klijai (koks jūsų pasirinkimas gali būti, kol jis prilimpa), galite prijungti akis prie nuorodų ir servo. Tai iš arčiau pavaizduota aukščiau esančiame 4 paveiksle. Tik šoninė pastaba, kai dedate servo ir sujungia arčiausiai akių esančią servo sistemą, taip pat turi būti pakelta į viršų. Taip yra todėl, kad vienas traukia x ašį, o kitas traukia y ašį. Tai yra didžiausias žingsnis ir kai kuriuos dalykus gali tekti koreguoti net ir tada, kai viskas bus sujungta.:)
4 žingsnis: KODO ŽINGSNIS


Pridedamas kodas prie arduino !! Viršuje yra šioms akims naudojamo kodo vaizdai. Pridėjau kreiptuką iš PS1 valdiklio, kad būtų galima valdyti akis.
5 žingsnis: 5 žingsnis: galva




Šis žingsnis yra neprivalomas ir užtrunka.
5 žingsnis: galvos sukūrimas
Reikalingos medžiagos
Polistirolo galvutė
peilis peiliu
karštas klijų pistoletas
Dabar šis žingsnis yra neprivalomas ir užtruko. Man tai tikriausiai užtruko 2 valandas. Deja, mano nusikalstamos veikos partneris netyčia nutraukė projektą ir, man baigus, susilaužė galvą. Šiaip ar taip, aš ką tik supratau, kiek giliai man reikia išpjauti iš apačios ir viršaus. Svarbiausia yra akys, joms reikia pakankamai vietos judėti ir eiti ratu, kaip matote 5 nuotraukoje. Akrilo pagrindas, kurį pasirinkau padaryti, išlipo iš šono, kaip matote 6 nuotraukoje. Tai gali būti uždengta ausinėmis arba kažkuo juokingo, pavyzdžiui, peruko.
Tada TADDAAAAA !!!!!! jūs visiškai baigėte šį projektą.
Tikimės, kad jums tai patinka, ir komentuokite žemiau, jei turite kokių nors klausimų ar tiesiog paklauskite:)
Rekomenduojamas:
TFT animacinės akys: 3 žingsniai

„TFT Animated Eyes“: šis projektas naudoja pigias dalis, kad sukurtų porą animuotų akių TFT ekranuose. Projektas paremtas „Adafruit“„Neįtikėtinomis akimis“projektą. Du ST7735 128x128 pikselių ekranus ir ESP32 plokštę paprastai galima įsigyti internetu maždaug
Baisiai išblukusios LED akys: 5 žingsniai (su nuotraukomis)
")
Baisiai išblukusios šviesos diodų akys: mikrovaldiklio, kaip „Arduino“, naudojimas šviesos diodui išblukinti ne visada yra geriausias pasirinkimas. Kartais norite paprastos, mažos galios grandinės, kuri gali būti įterpta tiesiai į atramą, kai kelias savaites veikia iš akumuliatoriaus. Išbandę apie
„Mecanum Omni“ratų robotas su GRBL žingsniniais varikliais „Arduino Shield“: 4 žingsniai

„Mecanum Omni“ratų robotas su „GRBL Stepper Motors“„Arduino Shield“: „Mecanum Robot“- projektas, kurį norėjau sukurti nuo tada, kai pamačiau jį Dejano „gread mechatronics“tinklaraštyje: howtomechatronics.com Dejan tikrai padarė gerą darbą, apimdamas visus techninės įrangos, 3D spausdinimo aspektus , elektronika, kodas ir „Android“programa (MIT
„Pasidaryk pats“6 ašių roboto svirtis (su žingsniniais varikliais): 9 žingsniai (su nuotraukomis)
: 9 žingsniai (su nuotraukomis)")
Pasidaryk pats „Robot Arm 6 Axis“(su žingsniniais varikliais): po daugiau nei metus trukusių studijų, prototipų ir įvairių nesėkmių man pavyko sukurti geležinį / aliuminio robotą su 6 laisvės laipsniais, valdomu žingsninių variklių. Sunkiausia buvo dizainas, nes Norėjau pasiekti 3 pagrindinius tikslus
Važiavimas mažais varikliais naudojant TB6612FNG: 8 žingsniai

Važiavimas mažais varikliais naudojant TB6612FNG: TB6612FNG yra dviejų variklių tvarkyklės IC iš „Toshiba“. Čia yra daug pertraukimo lentų, ir tai yra vienas iš populiariausių pasirinkimų vairuoti mažus variklius. Yra daug internetinių išteklių, kaip pradėti dirbti su TB6612FNG b